Pebble

Design Philosophy:
Pebble is my Antweight (1lb) combat robot inspired by my previous Beetleweight (3lb) Brick. Most combat robots try to damage the opponent as much as possible. Pebble flips this on its head, forgoing a weapon all together. Without a weapon, I was able to add complexity and weight to the drivetrain, to make it faster and more controllable than any other robot in its class. This flips the game on its head, and turns it from a damage game, to a control game. I can either outlast my opponent and win via a judges decision due to my dominating control, or I can push them into the pit, and win via a knock out before they get a chance to damage me.
Build:
At the core, Pebble has two symmetrical drive train modules. Aside from mounting the motor, these parts are purely held together with press fits and geometry. Designing it like this makes repairs and replacements super fast, and it keeps weight down by reducing hardware.
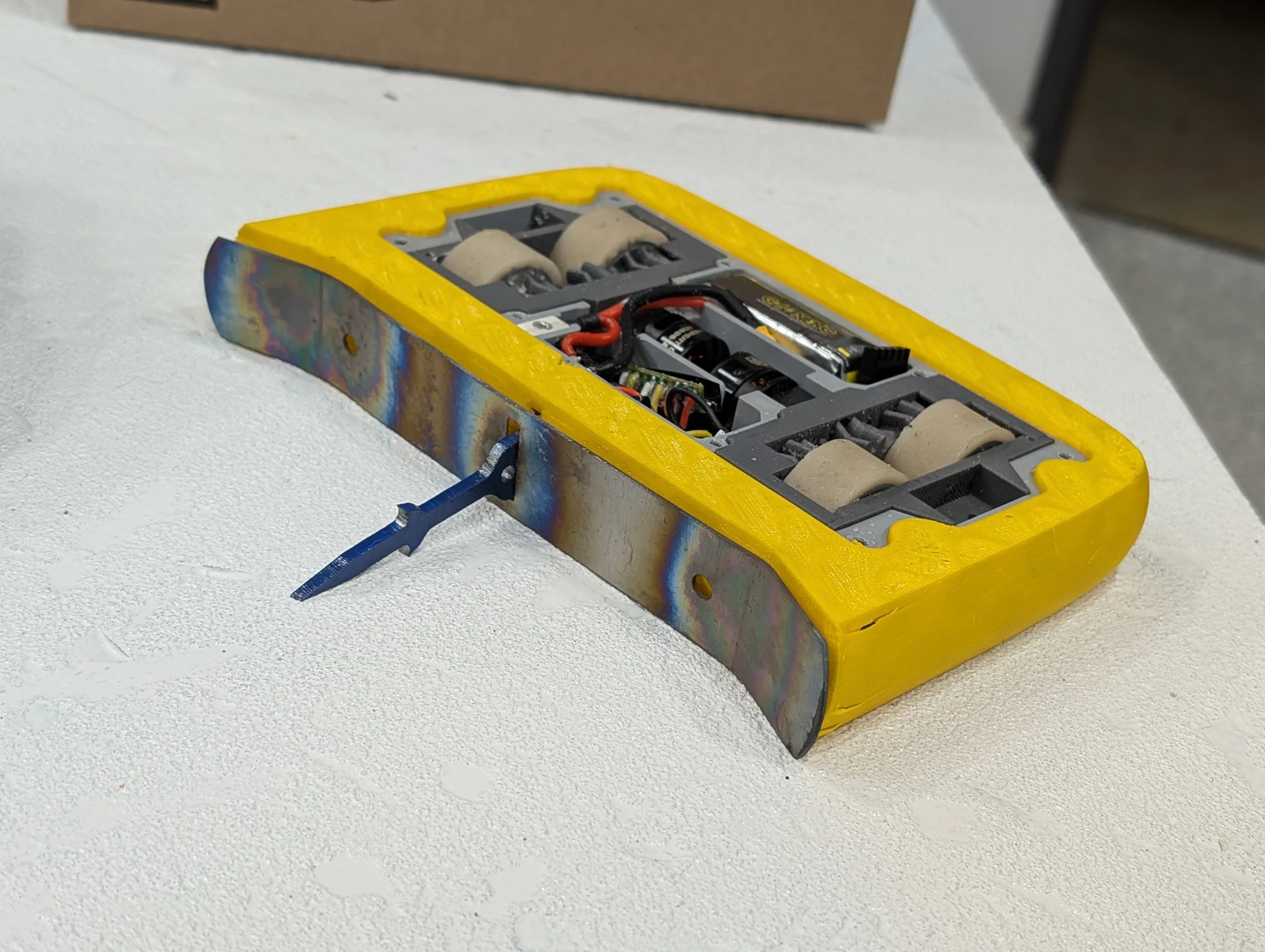
Inside each drive module, there are two wheels with herringbone gears printed as one piece with the hub. The hubs have a special pattern that locks in cast urethane tread. There is a third herringbone gear that sits between the two wheels with a 1:1 ratio. This purely connects both wheels to the motor. I hate setscrews, they like to back out, and when they fail, they fail in a way that prevents the motor from turning my wheels. To eliminate setscrews, I have cut aluminum squares with matching D shaped cutouts to the shaft on the motor, effectively making a poor man's keyed shaft. The square aluminum part then locks the shaft onto the gear. The geometry of a herringbone gear keeps it in place axially on the shaft. Each module then fits into the main body, again, without any screws.
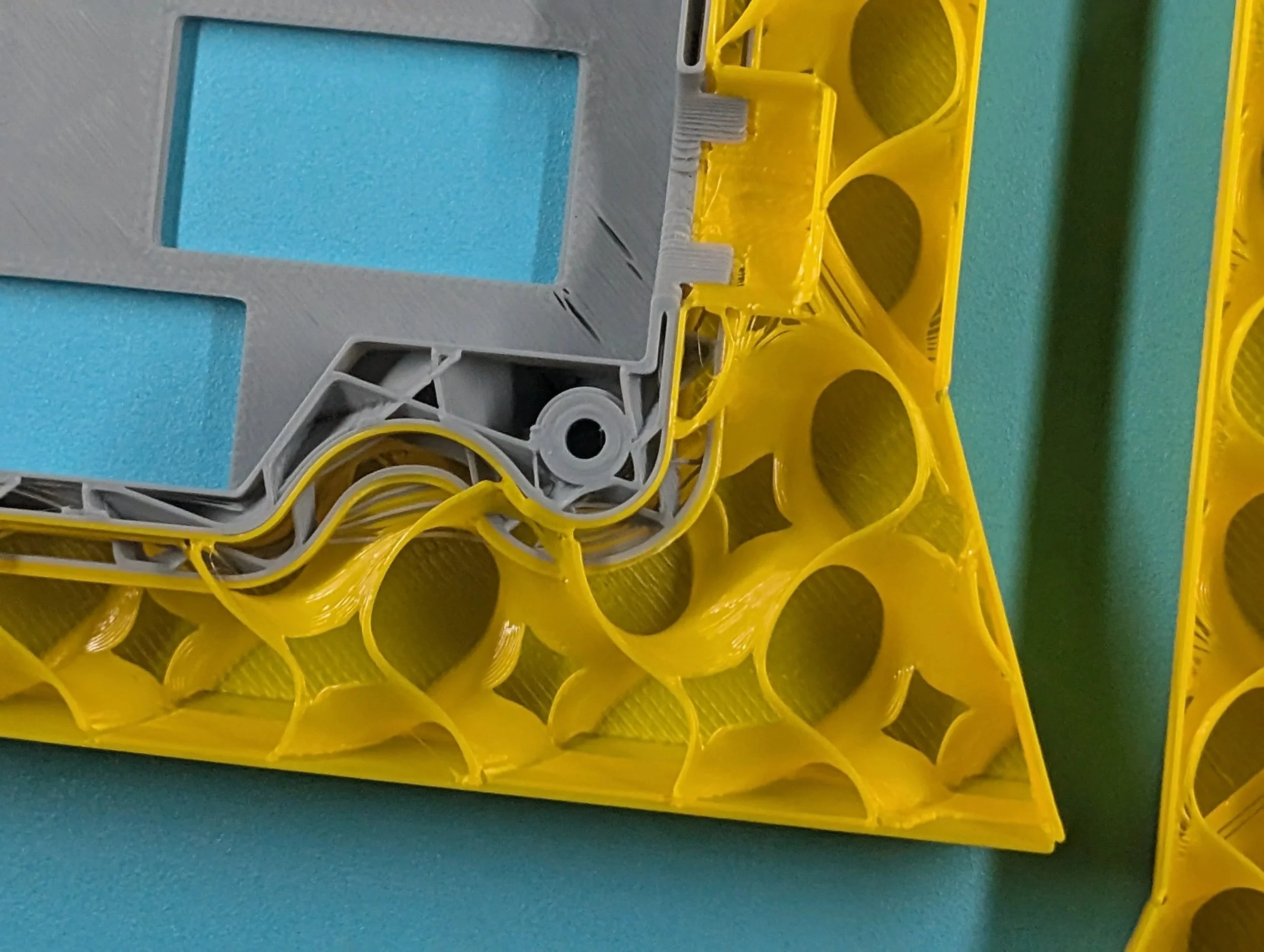
The main body is a print in place assembly with two dissimilar plastics. The first being Super PLA+. I have found that not only is Super PLA+ nearly as tough as nylon, but its also a bit more ductile. This makes a part more likely to bend instead of crack when large forces are applied. Yet it is still ridged enough to hold its shape under normal loads. The second material is TPU. TPU is well known in the combat robotics world as one of the most overpowered materials there is. Being flexible, it will often rip before breaking. Its increadibly tough, and has great layer adheasion. The only issue for making structural parts with it is its flexibility. Most of the time you can design around this fact, or combine it with ridged materials where needed. In my case, I can print the outside of my robot with TPU, and the interior with Super PLA+. This creates an armored layer around the more brittle PLA components.
Electronics:
Aside from the motors, Brick and Pebbles electronics are identical. I’m using two AM32 ESCs, paired with a teensy 4.0, IMU, and an ELRS Receiver. Most people directly pipe the PWM signals from their receiver right into the ESCs. Often one wheel will have less traction, more backlash, ect. than the other, so this will cause them to drift to one side or the other. With custom firmware I wrote, I can counter that by running a PID loop with data from the IMU. This locks the robot into a heading and keeps it driving perfectly straight.

Magnets:
The key to Pebbles speed and pushing power is two powerful magnets built into each drive module. The floor we fight on is made of steel, so this grants me additional downforce. I’ve chosen to use N52 magnets, as they are the strongest. These are strategically placed centered between the wheels, this means its very unlikely I will get stuck.
Performance:

Damage after a fight at Rumble in Redmond 2025
At Pebbles first event (Rumble in Redmond), I did pretty well. I was trying a new brand of TPU. I had heard rumors that Silk TPU was more robust than normal TPU. It was not. Any time I was hit, the shell would break apart like spaghetti. Even with this defect, I was still able to take home first place, fighting my way through the losers bracket after having an electrical issue due to the reset button on the teensy being bumped.

Victory at Olympia Tournament and Joust 2026
At the second event I took it to, (Olympia Tournament and Joust 2026), I had swapped to higher quality plastic. I got very lucky with the way the bracket was randomized, and ended up going undefeated to victory, again claiming first place.
Future work:
In the future, I want to turn both Brick and Pebble into fully autonomous robots. This won't be for any kind of competitive advantage, but because I want to push what is possible. Very few competitors have any form of assists, let alone autonomous code.